Малко се позабавихме с развитието на робота, но разбира се не сме се отказали. След доста усилена работа и проби в момента стигнахме до тук:
Ето с какво разполагаме в момента, като възможности:
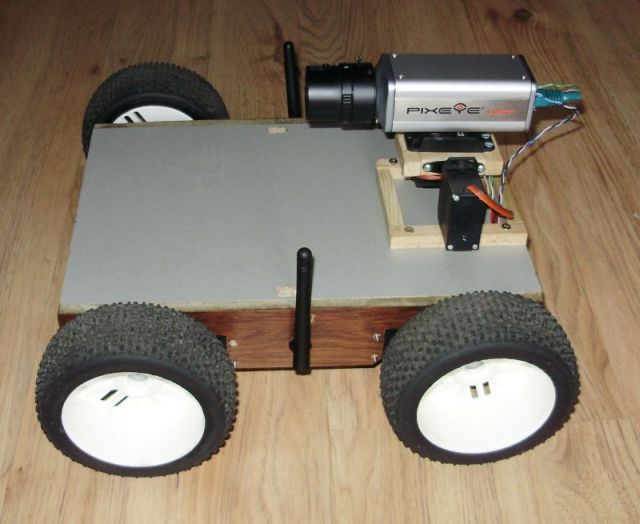
- Задвижване 4х4, като всяко колело има собствено управление.
- IP камера с висока резолюция - Pixeye MEGA, която чрез wireless адаптор предава видео в реално време до PC. Камерата е монтирана на стойка която позволява независимо позициниране.
- PC базиран софтуер, чрез който се подават команди за управлението на робота и се визуализара избражението от камерата и различни контролни параметри. За управлението в момента ползваме стандартен компютърен джойстик. Предаването на командите до робота става чрез безжична връзка базирана на ZigBee протокола.
Повече информация, снимки и видео ще публикуваме в отделните теми по проекта.


