Този проект за ръка съвсем го изоставих, ама нещо все не остава време. Сега ще продължа да описвам това което направих преди време. Накратко да разкаже за акселерометрите, в този експеримент ползвха триосен вариант ADXL330, което ще рече че чипа разполага с акслерометър за всяка едно осите X,Y,Z. Всеки един от тях може да мери динамично и статично ускорение. Последното означава че схемата реагира и на земната гравитация и тъй като нейната посока е добре известна и оттук може да определим как ориентиран сензора спрямо земната повърхност.За яснота прилагам една картинка от документацията на чипа:
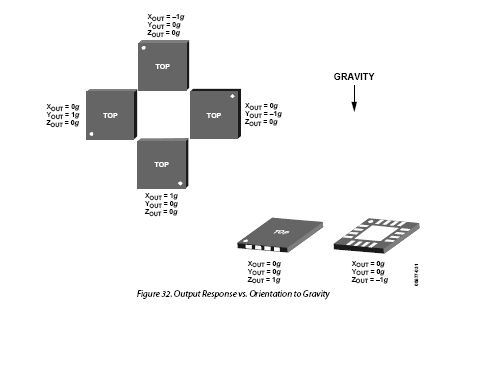
Нека разгледаме варианта при който сензора е успоредно на земната повърхност, тогава имаме изходен сигнал само по оста Z - 1g. Да видим какво значи това като напрежение. Сензора има определена чуствителност (300mV/g) и максимален работен обхват от ±3.6g Значи при едно 1g (9.81m/s^2) ще имам 300mV на изхода, тук обаче има една особеност, нулата на сензора е отместена на 1/2 от захранващото напрежение (типично 3V), за да може да се мерят и отрицателни стойности. Разбира се тук не става въпрос да мерим антигравитация

, а просто в зависмост от направлението на приложеното ускорение имам е различен знак. И така при едно 1g на изхода на сензора имаме 1.8V (при -1g ще имаме 1.2V). Това беше по оста Z, но по интересни са другите 2 оси X,Y там имаме 0g (1.5V) Сега ако започнем да накляняме сензора по някоя от осите на изхода ще се появи напрежение пропорционално на ъгъла на наколона и по точоно пропорционално на синуса от ъгъла между равнината на сензор и земната повърхност. Примерно наклонили сме сензора на 30 градуса по оста X, това значи че имаме сигнал на изхода 1g*sin(30deg)=0.5g или като напрежение 1.5 +0.15 =1.65V или ако накланянето е в обратна посока 1.35V. Синус функцията за малки ъгли е почти линейна и може лесно да се получи точния ъгъл на отклонение, за големи ъгли обаче функцията ства силно нелинейна и там е по сложно. Разсъжденията дотук са валидни при условие че нямаме динамични ускорения в противен случай те ще доведат до грешка при отчитане на ъгъла. В общи линии това е теоритичната част в следващата тема, ще обсъдим практическата реализация.


