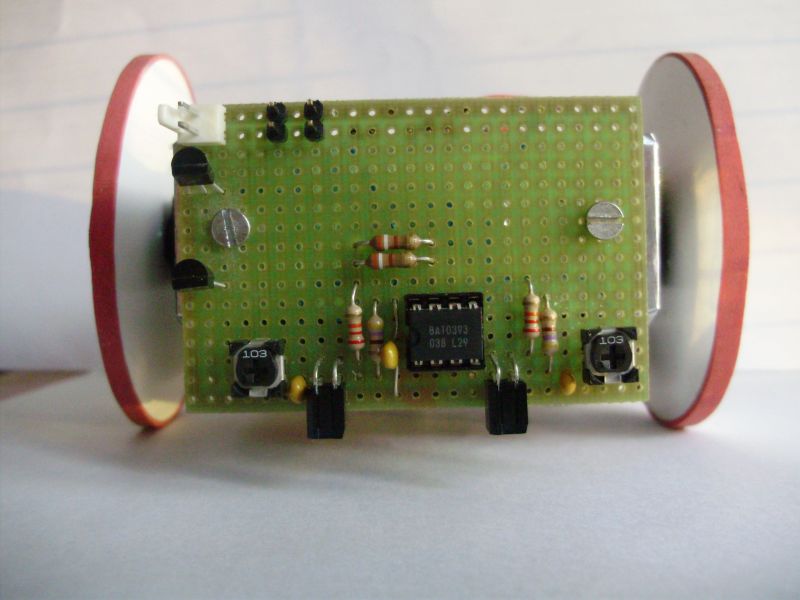
Ето снимка на схемата, налепена на експериментална платка и закачена на робо платформата.
Конструкцията на следача е реализирана с 2 датчика отстрани на линията. Датчиците са монтирани на 6-8 мм от повърхността. Захранването се осъществява с 4 NiMH акумулаторни батерии и е около 5V.
Принципа на десйтвие на схемата е прост. Ще пиша за схемата на управление на десния мотор, за левия нещата стоят аналогично. Когато датчика е извън линията и имаме отразен сигнал и през фототранзистора тече ток, който предизвиква пад на напрежение върху R2. В конкретното изпълнение имаме някъде около 1.1V на пин 2 на компаратора (Uin(-), инвертиращия вход). На пин 3 (Uin(+), неинвертиращия вход) имаме опрно напрежние за сравнение. Тук съм го избрал 2.5V, т.е тримера PR1 е настроен някъде по средата. Изхода на компаратора ще бъде във високо ниво, тъй като Uin(+)>Uin(-). През резистора R1, Q1 се отпушва и мотора ще работи. Когато и двата датчика са извън линията, съответно и двата мотора ще работят и робота се движи направо. Какво ще стане ако робота "настъпи" линията с десния датчик? Тока през фототранзистора ще намалее (няма да имаме отразен сигнал).Напрежението на инвертиращия вход стига около 3-3.5V. Сега вече имаме Uin(+)<Uin(-) изхода на компаратора е във ниско ниво, което предизвиква запушване на транзистора и спиране на десния мотор. Тъй като левия мотор продължъва да работи това ще предизвика завиване на ляво докато десния датчик излезе от линията и всъщност така се осъществява следнето на линята.
За правилната работа на следача е необходимо, опорното напрежение да е настроено по средата между двата прага. Конкретните стойности на праговете зависят то няколко неща- работния ток да светодиода в RPR-220 (тук е някъде около 8mA), от стойността на товарния резистор R2, от разстоянието до повърхността и нейните отражателни способности. Влияния оказва съшо и външната осветеност, и за да се намали този фактор се използват елементи работещи в ИЧ диапозона.
При правилно изпълнена и настроена схема робота следва линията доста добре, обаче ако завоите са много остри ги изпуска, поради механичната инерция на шасито. И накрая да добавя, че разстоянието между 2 датчика се определя от дебелинта на линията, стандарта мился че беше на 3 см, в конкретния пример робота е настроен за по тънка линия - 2 см.


